Ouster激光雷达快速配置指南
Ouster激光雷达快速配置指南主要参考:
https://www.guyuehome.com/41300
https://ouster.atlassian.net/servicedesk/customer/portal/8/article/2356183369
https://ouster.atlassian.net/servicedesk/customer/portal/8/topic/a43ee57b-c27c-431c-aaa7-f2d282a6dc10/article/928120883
OS1-128的转换盒电源输入额定为24V 1.5A
1. 下载Ouster官方ROS驱动ouster-ros依赖安装:
This driver only supports Melodic and Noetic ROS distros.
In addition to the base ROS installation, the following ROS packages are required:
1234sudo apt install -y ...

Mid-360 快速配置指南
Mid-360 快速配置指南1.安装 Livox-SDK2123456$ git clone https://github.com/Livox-SDK/Livox-SDK2.git$ cd ./Livox-SDK2/$ mkdir build$ cd build$ cmake .. && make -j$ sudo make install
(卸载SDK:
12$ sudo rm -rf /usr/local/lib/liblivox_lidar_sdk_*$ sudo rm -rf /usr/local/include/livox_lidar_*
2.安装livox_ros_driver2clone到[work_space]/src/路径下
1234git clone https://github.com/Livox-SDK/livox_ros_driver2.git ws_livox/src/livox_ros_driver2cd livox_ros_driver2source /opt/ros/noetic/setup.sh./build.sh ROS1
3.连 ...
从场地模型生成点云地图文件
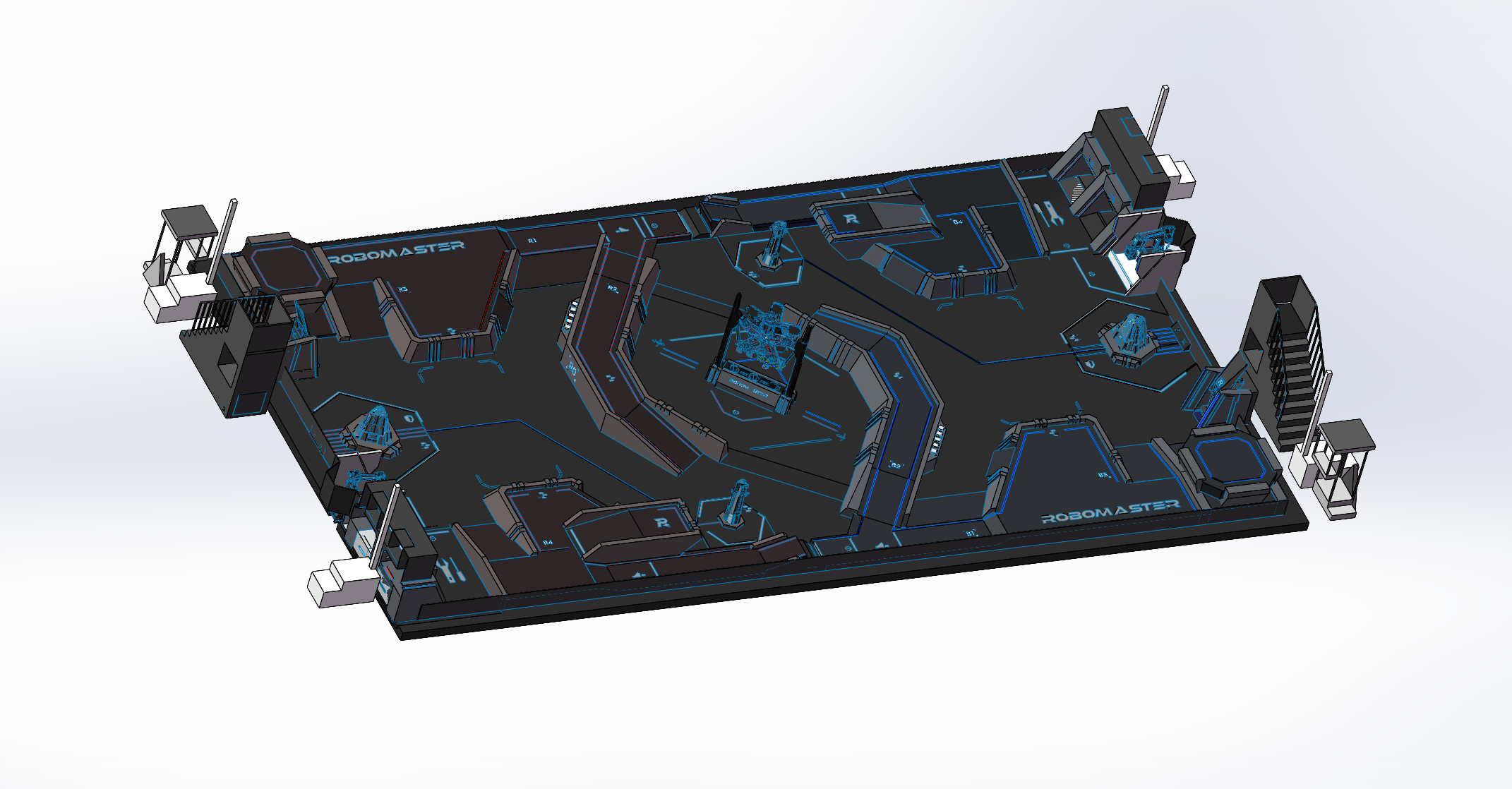
从RM场地模型生成点云地图pcd文件
把官方的场地模型先从装配体.SLDASM转换成一个零件.SLDPRT,这样做是为了转换成STL格式是一整个场地的文件,而不是若干个小零件的STL。
官方的坐标系y朝上,我们先把它改成z轴朝上,在SLDPRT中,新建一个坐标系,具体步骤:参考几何体→坐标系→选择场地的一个角作为坐标系原点,然后设置两个坐标轴的方向就能确定下来一个坐标系
另存成STL文件,注意保存时,选择选项→选择坐标系为刚才新建的坐标系1→单位选择米
用CloudCompare打开STL文件,选中Mesh,点击左上角Edit→Mesh→Sample points,输入生成点的数量,这里可以不勾选get colors,生成点云后,选中Mesh.sampled,左上角File→Save→pcd格式保存这样生成的点云文件只有XYZ坐标,没有intensity等信息

Ubuntu下Clash的配置
Ubuntu下Clash的配置第一步 下载clash图形化应用
https://github.com/Fndroid/clash_for_windows_pkg/releases 选择x64-linux.tar.gz版本
汉化补丁:http://dw1.155cc.xyz/
12345cd Downloadssudo tar -zxvf Clash.for.Windows-0.20.12-x64-linux.tar.gz sudo mv ./Clash.for.Windows-0.20.12-x64-linux /opt/clashcd /opt/clash./cfw #启动图形化界面
第二步 导入订阅链接
略
第三步 手动设置系统代理ip和端口
添加桌面图标
首先把下面这个logo图片放进/opt/clash (随便找个路径也行,别被删掉就行)
1234567891011121314cd Downloadsgedit Clash.desktop#粘贴以下[Desktop Entry]Encoding=UTF-8Name=ClashIcon=/opt/clash/cl ...
【论文阅读】Intelligent Physical Attack Against Mobile Robots With Obstacle-Avoidance
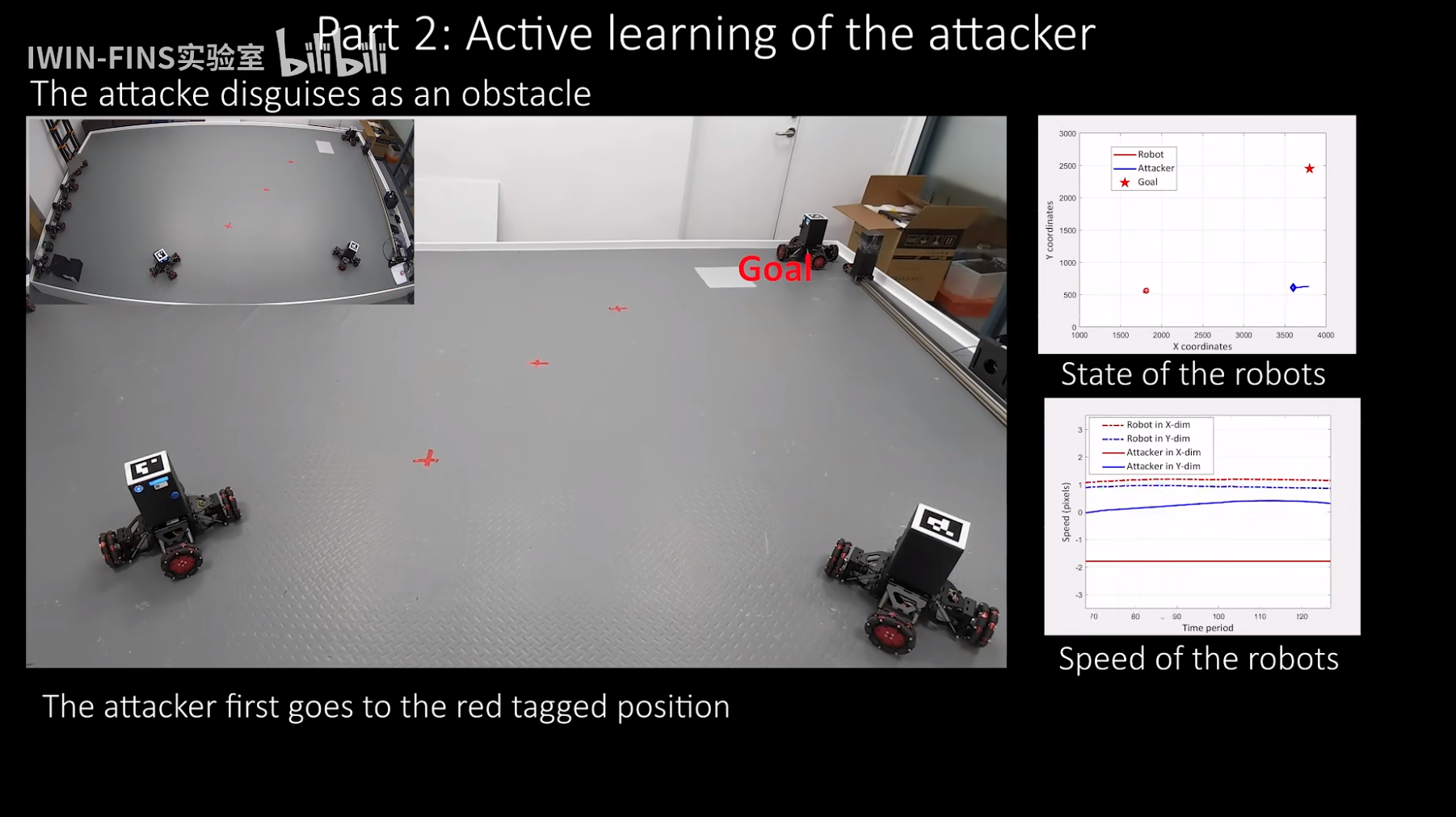
【论文阅读】Intelligent Physical Attack Against Mobile Robots With Obstacle-Avoidance标题:Intelligent Physical Attack Against Mobile Robots With Obstacle-Avoidance作者: Yushan Li et al.机构:上海交通大学来源:TRO 2022
🏷️摘要近年来,移动机器人的安全问题引起了广泛关注。在本文中,我们提出了一种智能的物理攻击(physical attack)方法,通过从外部观察(指用一个天花板上的相机识别Tag获取机器人位置)学习受害机器人(victim robot)的避障机制( obstacle-avoidance mechanism),将受害机器人困在预设位置。我们工作的新颖之处在于,揭示了具有智能和先进设计的基于物理的攻击(physical-based attack)而无需事先了解系统的动力学或访问内部系统,会对移动机器人产生真正的威胁。在传统的网络空间安全中,这种攻击无法通过反措施进行处理。我们提出的攻击方法的基础是主动 ...

面向RMUA2022比赛的移动机器人全向感知系统
面向RMUA2022比赛的移动机器人全向感知系统目录
软件功能介绍
依赖环境及运行方式
软件功能介绍机器人端全向感知模块通过安装在机器人上的四个相机,搭配广角镜头可以获取机器人周围的全向视野,通过检测周围的机器人和装甲板,可以辅助规划和决策模块完成动态避障,防绕后等行为。由于通信受限等原因,机器人可能无法稳定地接收来自哨岗的信息,这时候机器人的自主感知能力就显得尤为重要。全向感知模块的检测功能与哨岗类似,但它可以让机器人在不依赖外界信息输入的条件下仍具备一定的自主感知能力,使其更加智能化。另外,由于增加了一个检测信息来源,在机器人接收到的哨岗信息出现明显错误时,可以利用机器人端的全向感知模块及时进行纠正,使整个感知系统更加稳定可靠。
1 全向感知系统流程全向感知系统的整个流程可以大致分为两部分:前端目标检测和后端信息整合。在前端,使用4个subscriber分别订阅四个相机图像话题,在这四个回调函数里分别对图像进行检测,使用tensorRT部署YOLO v5s目标检测模型,把当前图像的时间戳和检测结果保存下来。对四个图像的时间戳进行同步判断,保证四个相机的检测结果是近似同一时间获 ...

【论文阅读】LVI-SAM Tightly-coupled Lidar-Visual-Inertial Odometry via Smoothing and Mapping
【论文阅读】LVI-SAM: Tightly-coupled Lidar-Visual-Inertial Odometry via Smoothing and Mapping作者:Tixiao Shan et al.
机构:MIT
来源:ICRA 2021
🏷️摘要我们提出了一个通过平滑和建图实现激光-视觉-惯性里程计的紧耦合框架LVI-SAM,其实现了高精度和鲁棒性的实时状态估计和地图构建。LVI-SAM采用因子图,由两个子系统组成:一个视觉惯性系统VIS和一个激光雷达惯性系统LIS。这两个子系统以紧耦合的方式,其中VIS利用LIS的估计进行初始化。利用激光雷达测量提取视觉特征的深度信息,提高了VIS的精度。反过来,LIS利用VIS提供初值进行scan-matching,并作为点云配准的初始值。首先由VIS进行回环检测,再由LIS进一步细化。当两个子系统中的一个发生故障时,LVI-SAM也可以发挥作用,这增加了它在无纹理和无特征环境中的鲁棒性。LVI-SAM 对从多个平台在各种规模和环境中收集的数据集进行了广泛评估。
🏷️前人工作总结基于Lidar的方法可以远距离捕捉环境的细节 ...

【论文阅读】LIO-SAM Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping
【论文阅读】LIO-SAM标题:LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping作者:Tixiao Shan et al.机构:MIT来源:IROS 2020
🏷️摘要我们提出了一个紧耦合的激光-惯性里程计LIO-SAM,通过优化包含LiDAR里程计因子,IMU预积分因子,GPS因子和回环因子来得到机器人的全局一致的位姿。加入IMU预积分可以给激光里程计提供初始猜测并帮助去除点云运动畸变。使用帧-局部地图匹配代替LOAM的帧-全局地图匹配,提高了帧图匹配的效率,使整个系统的实时性能得到了提升。
🏷️前人工作总结LOAM是目前为止激光里程计(LO)领域最经典最广泛使用的方法。但是它存在一个问题,就是它直接存储全局体素地图而不是局部地图,从而很难执行回环检测以修正漂移,或者结合GPS等其他绝对测量值进行位姿修正。并且使用体素地图的优化效率会随时间降低。为了克服该问题,作者只独立地存储每个关键帧的特征,而不是在位姿估计完成后就将特征加入到全局地图中。
另一方面,IMU和LiDAR的联合位 ...
面向RMUA2022比赛的视觉标签检测及辅助定位系统
面向RMUA2022比赛的视觉标签检测及辅助定位系统 Vision Marker Detector for RMUA 2022在RMUA2022赛季,我们战队开发了一套利用场地内视觉标签进行辅助定位的系统,主要工作包括检测标签,字母识别,位姿优化。我们的检测系统具备一定的拓展性,除了场地内的英文字母外,还支持自定义标签的识别,亦可方便地应用于Sim2Real挑战赛中。因为比赛中机器人底盘的快速移动带来的相机运动模糊对于检测标签极为不利,标签的角点提取会不可避免地存在噪声,比赛的动态场景中存在标签被遮挡的情况,所以无论从精度,实用性还是鲁棒性上来说,视觉标签定位都与激光雷达定位存在较大差距,我们只将它作为一种辅助性的定位手段,可以用于给定位提供初始化位姿,也可用于定位失效后的重定位。
本项目主要参考了以下工作:
AprilTag: A robust and flexible visual fiducial system
AprilTag 2: Efficient and robust fiducial detection
opencv_contrib/aruco
1.依赖本项目在以 ...

ROS advertise函数参数详解
ROS advertise函数参数详解突然想知道advertise函数里第三个参数到底是什么含义,网上博客找了一圈每一个解释清楚的,这里记录一下
首先看一下官方的注释:
1234567891011121314151617181920* \brief Advertise a topic, simple version** This call connects to the master to publicize that the node will be* publishing messages on the given topic. This method returns a Publisher that allows you to* publish a message on this topic.** This version of advertise is a templated convenience function, and can be used like so** ros::Publisher pub = handle.advertise<std_msgs:: ...