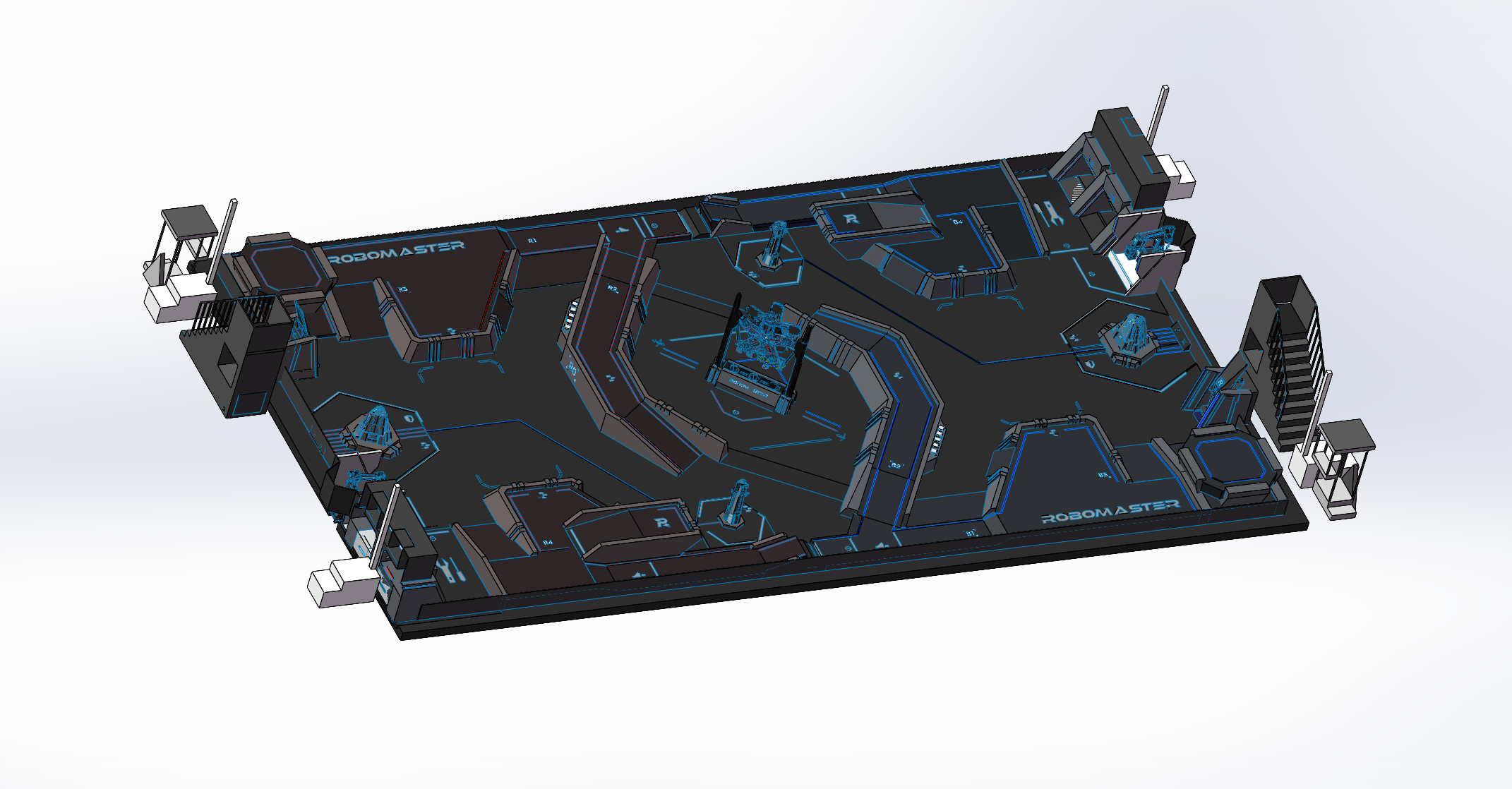
从场地模型生成点云地图文件
从RM场地模型生成点云地图pcd文件
- 把官方的场地模型先从装配体.SLDASM转换成一个零件.SLDPRT,这样做是为了转换成STL格式是一整个场地的文件,而不是若干个小零件的STL。
- 官方的坐标系y朝上,我们先把它改成z轴朝上,在SLDPRT中,新建一个坐标系,具体步骤:参考几何体→坐标系→选择场地的一个角作为坐标系原点,然后设置两个坐标轴的方向就能确定下来一个坐标系
- 另存成STL文件,注意保存时,选择选项→选择坐标系为刚才新建的坐标系1→单位选择米
- 用CloudCompare打开STL文件,选中Mesh,点击左上角Edit→Mesh→Sample points,输入生成点的数量,这里可以不勾选get colors,生成点云后,选中Mesh.sampled,左上角File→Save→pcd格式保存
这样生成的点云文件只有XYZ坐标,没有intensity等信息

本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 JiaFan's Blog!
评论
Va