SLAM问题中的李群和李代数
SLAM问题中的李群和李代数
0.动机
在探讨李群李代数之前,我们先思考一个问题。为什么要在SLAM中引入李群和李代数?答:为了优化过程中的求导。
先来看一下最简单的最小二乘问题:
简单来说,我们要找到一个 $x$,使函数达到极值,换成SLAM的情景,就是我们要找到一个位姿,让它最“合理”,我们一般定义观测与实际数据的误差,尽量使其最小化。
还是先从简单的例子开始考虑,如果函数是像 $f(x)=x^2$ 这种很简单的形式,那么很容易通过求导数为0点,通过解析形式求出结果。然而一旦函数变得复杂,无法以解析形式求解,就需要用迭代的方式进行求解了:
先给定一个初始值 $x_0$
寻找一个增量 $\Delta x$,使$ \left|f\left(x_{i}+\Delta x\right)\right|_{2}^{2}<\left|f\left(x_{i}\right)\right|_{2}^{2}$ (其实就是寻找函数降低的方向)
若 $\Delta x$ 足够小,则停止迭代
- 否则令 $x_{i+1}=x_{i}+\Delta x$ ,继续迭代
问题就出在第二步上,求取函数的下降方向就需要对函数求导,回想一下导数的定义,再看看第二步做了什么,怎么都绕不开一件事 $x_{i+1}=x_{i}+\Delta x$ ,然而问题是,连续变换时,旋转矩阵R更新的方式是不断左乘新的旋转矩阵,而不是加。
回顾一下旋转矩阵R的性质:它是一个行列式为1的正交矩阵。即它的逆就是它自身的转置 $R^{-1}=R^{T}$ 。一个旋转矩阵加另一个旋转矩阵,得到的那一坨东西并不一定还能满足旋转矩阵(特殊正交群$SO(3)$)的性质,我们管这个叫:
特殊正交群对加法不封闭,但把其映射成李代数之后,向量的加法是封闭的,从而解决求导这个问题
1. 一些概念
1.1 什么是群?
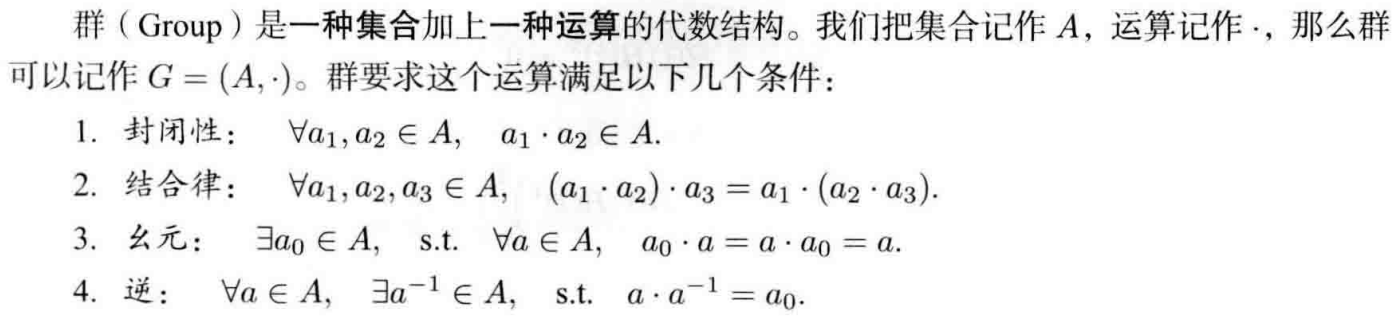
旋转矩阵和乘法就构成了旋转矩阵群,但旋转矩阵和加法不能构成群,因为不满足封闭性,旋转矩阵本身具有约束$\left\{R \in \mathbb{R}^{n \times n}\left|R \times R^{T}=I\right| \operatorname{det}(R)=1\right\}$,两个旋转矩阵相加$R1+R2$的结果就不能满足上述约束了,但$R1R2$可以满足,此外,旋转矩阵还满足结合律:$R1R2=R2*R1$,还有幺元是单位矩阵$I$,也有逆矩阵满足R乘以R的逆等于幺元(单位阵)。我们在SLAM里最常说的有两个,一个是特殊正交群$SO(3)$,也就是旋转矩阵群,还有特殊欧氏群$SE(3)$,也就是变换矩阵群,3代表是三维的。
1.2 什么是李群?
李群的定义是指连续光滑的群,比如我们前面说的旋转矩阵群$SO(3)$,你可以想象你拿个杯子就可以在空间中以某个支点连续地旋转它,所以$SO(3)$它就是李群。如果你一般旋转一边移动它,也是连续的或者说光滑的运动,所以变换矩阵群$SE(3)$也是李群。
1.3 什么是李代数?
先上结论:李代数对应李群的正切空间,它描述了李群局部的导数。
通过一系列推导,我们可以得到旋转矩阵的微分是一个反对称矩阵左乘它本身
上式是一个关于R的微分方程,并且 $R(0)=I$ ,解得:
于是我们有了一个向量 $\phi$ ,反应了$R$在局部的导数关系,实际上 $\phi $ 正是特殊正交群 对应$SO(3)$的李代数 $\mathfrak{s o}(3)$
旋转矩阵特殊正交群 $SO(3)$ 对应的李代数 $\mathfrak{s o}(3)$ 的元素是实数域的三维向量(三维反对称矩阵)
李代数的数学定义:$\mathfrak{s o}(3)=\left\{\phi \in \mathbb{R}^{3}, \Phi=\phi^{\wedge} \in \mathbb{R}^{3 \times 3}\right\}$
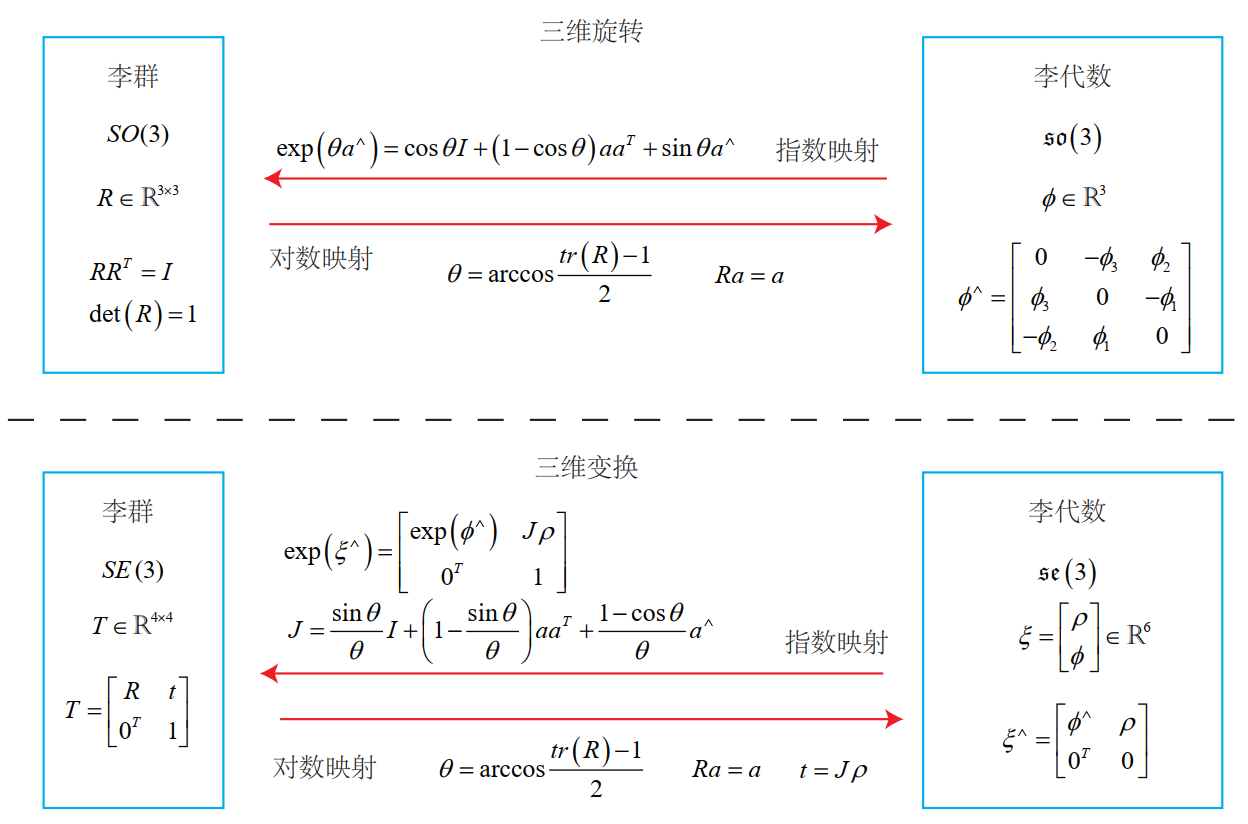
$\mathfrak{s o}(3)$ 与 $SO(3)$的关系由指数映射给定: $\boldsymbol{R}(t)=\exp \left(\phi_{0}^{\wedge} t\right)$
下面我们来探讨这个指数映射的含义。
2. 指数和对数映射
2.1 SO(3)上的指数映射
如何计算$\exp \left(\phi_{0}^{\wedge} t\right)$?
任意矩阵的指数映射可以写成一个泰勒展开,但是只有在收敛的情况下才会有结果,其结果仍是一个矩阵。比如对于矩阵 $A$:
同样的,对于旋转矩阵$R$:
由于 $\phi$ 是一个三维向量,我们可以用它的模长 $\theta$,和表示方向的单位向量 $a$来表示,即 $\phi=\theta a$,并且会有下面两个性质:
这两个式子提供了处理$a^{\wedge}$高阶项的方法,于是上面的指数映射可以写成
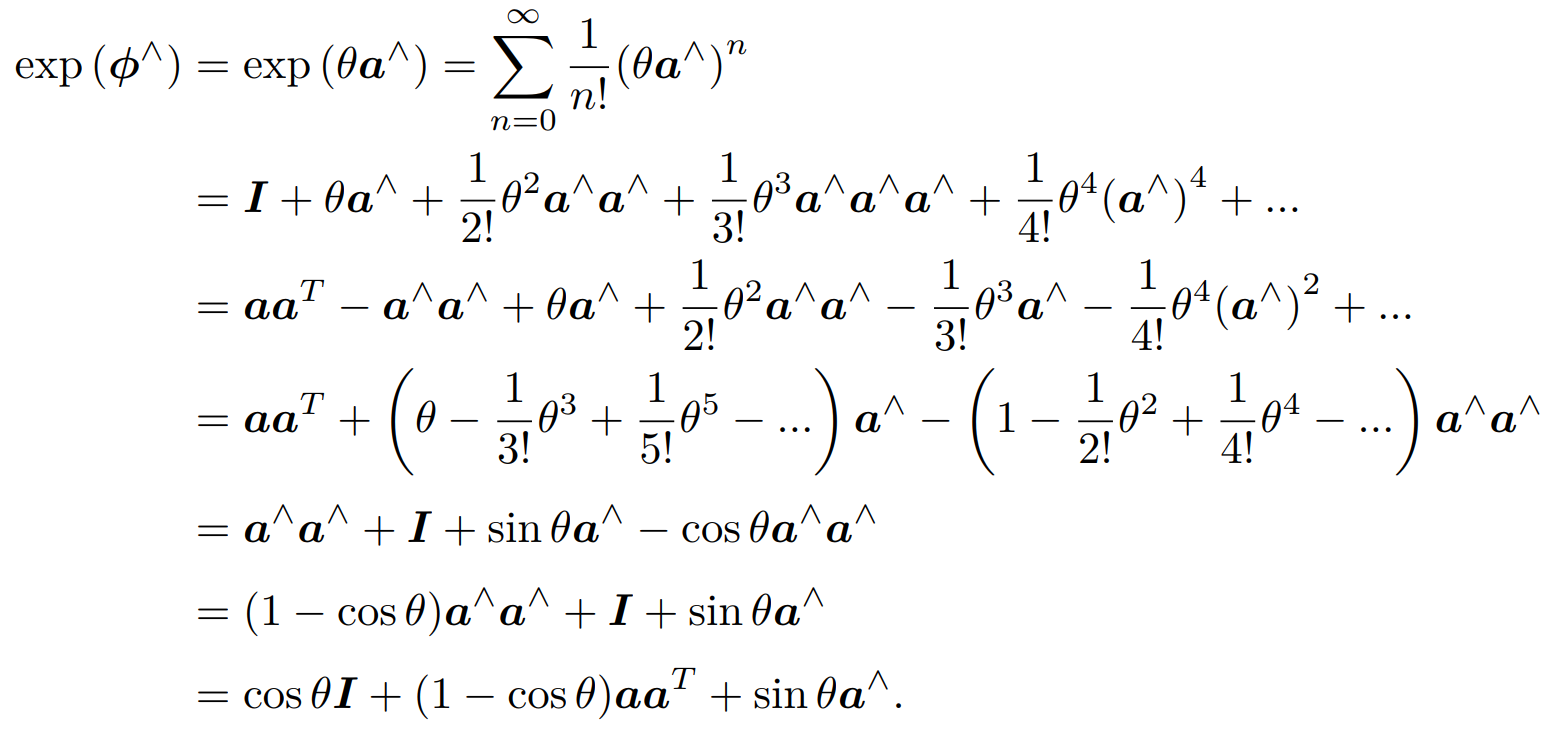
最后推导出的结果和罗德里格斯公式一模一样,这下就全说通了, 旋转矩阵特殊正交群 $SO(3)$ 对应的李代数 就$\mathfrak{s o}(3)$ 是旋转向量组成的空间。如果把旋转角度固定在$±π$之间,那么$SO(3)$和$\mathfrak{s o}(3)$ 的元素是一一对应的。旋转矩阵的导数可以由旋转向量指定,指导着如何在旋转矩阵中进行微积分运算。
2.2 SE(3)上的指数映射
建议直接看十四讲。
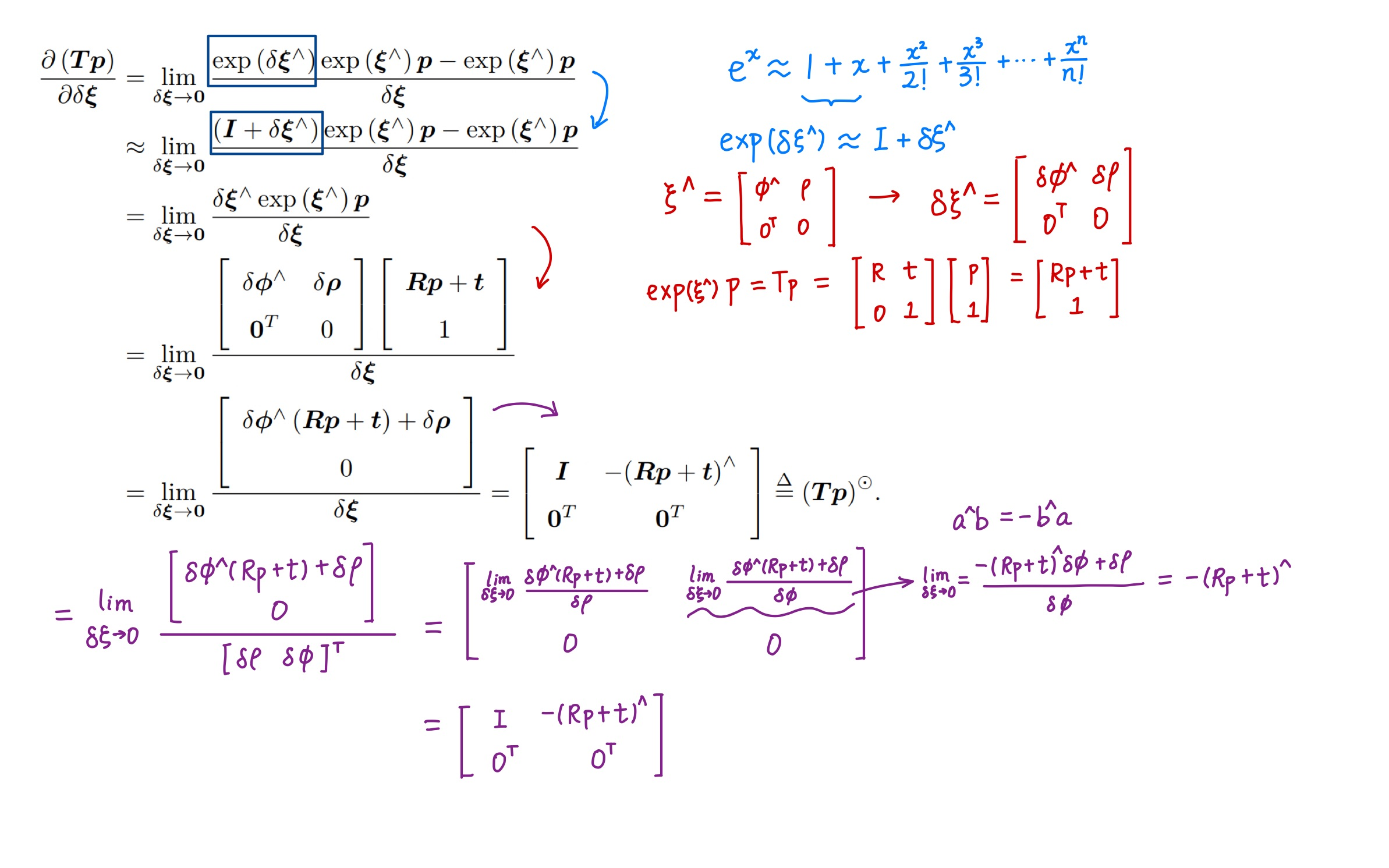
3. 李代数求导与扰动模型
SO(3)上的李代数求导,扰动模型左乘的推导都比较简单,看书自己慢慢推就行,这里我给出SE(3)上的李代数求导的详细推导:
参考资料:
从零开始一起学习SLAM | 为啥需要李群与李代数?https://www.sohu.com/a/270402234_100007727
菠萝包包包, “李群和李代数 —— 名字听起来很猛其实也没那么复杂“