Ouster激光雷达快速配置指南
Ouster激光雷达快速配置指南
主要参考:
https://www.guyuehome.com/41300
https://ouster.atlassian.net/servicedesk/customer/portal/8/article/2356183369
OS1-128的转换盒电源输入额定为24V 1.5A
1. 下载Ouster官方ROS驱动ouster-ros
依赖安装:
This driver only supports Melodic and Noetic ROS distros.
In addition to the base ROS installation, the following ROS packages are required:
1 | sudo apt install -y \ |
where $ROS-DISTRO is either melodic or noetic.
Additional dependenices:
1 | sudo apt install -y \ |
克隆项目到工作空间:
1 | cd catkin_ws/src |
编译:
1 | cd catkin_ws |
2. 网络配置与IP设置
用avahi-browse命令查询雷达IP
1 | avahi-browse -lr _roger._tcp |
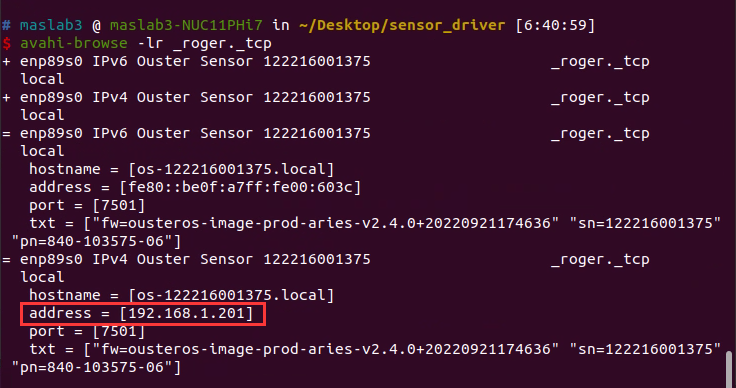
这里已经被我修改过了,实际上这个雷达初始的IP是169.254.108.61 ,这时查到的雷达IP为动态IP。每次上电后有可能会变,到时候需要再查询,然后再改驱动的启动指令,会非常的不方便。因此需要将雷达的IP改为静态IP,即每次上电雷达的IP不变:
安装httpie组件来实现雷达静态IP设置:
1 | sudo apt install -y httpie |
首先验证下默认IP是否是静态IP:
1 | #http http://雷达.当前.IP.地址/api/v1/system/network/ipv4/overridehttp |
如果输出:
1 | $ http http://169.254.108.61/api/v1/system/network/ipv4/override |
这里的null就表示是 非静态ip
修改为静态IP的指令如下:
1 | echo \"192.168.1.201/24\" | http PUT http://169.254.108.61/api/v1/system/network/ipv4/override |
终端输出:
1 | $ echo \"192.168.1.201/24\" | http PUT http://169.254.108.61/api/v1/system/network/ipv4/override |
证明静态IP配置成功
上面命令中“24”是给雷达设置的子网掩码(subnet mask),在这里24=255.255.255.0. 这个子网掩码是最常使用的,当然某些特殊情况下子网掩码可能需要设置为255.255.0.0, 这时可以将24改成16即可。上图中命令执行后的结果中显示有 “OK”,表明设置成功了。
注意:雷达IP设置成功后需要重启雷达才能生效。
这里设置的与Livox的IP位于同一网段内,方便收集数据。
再次重启雷达,再次输入命令:
1 | avahi-browse -lr _roger._tcp |
即可看到此时雷达的ip为刚才设置的固定静态IP
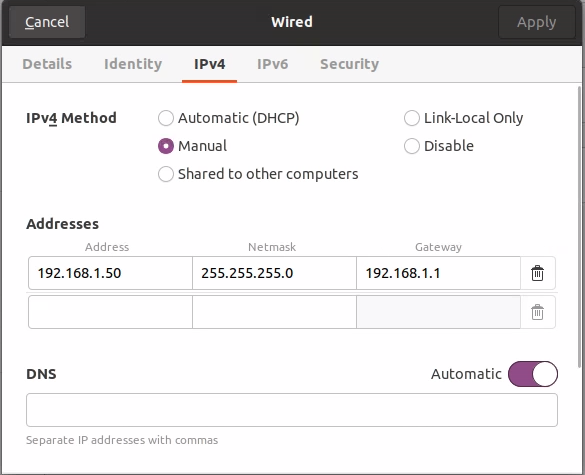
另外设置PC有线网卡的IP与雷达处于同一网段内:
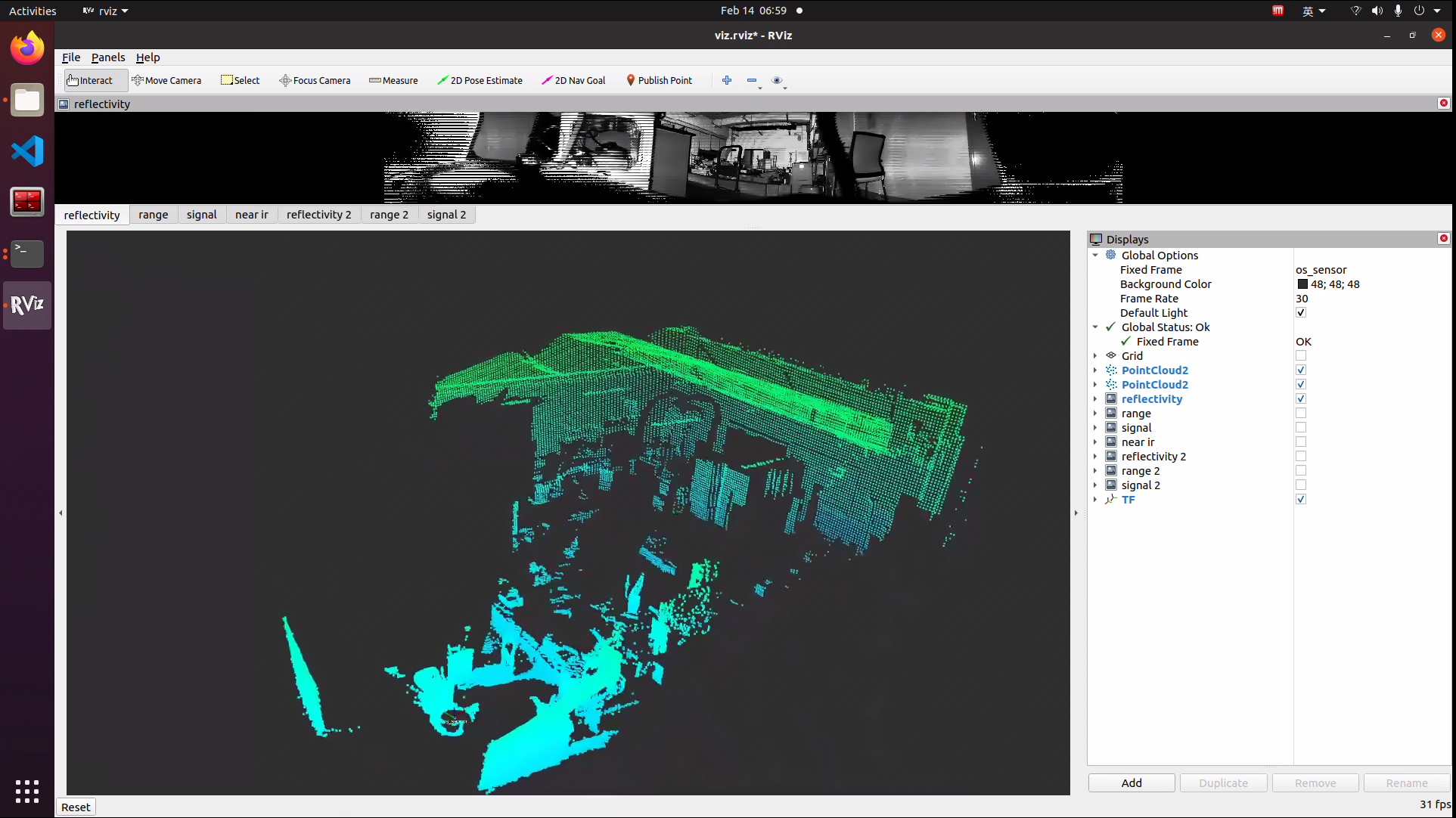
3. 运行launch文件
1 | roslaunch ouster_ros sensor.launch sensor_hostname:=192.168.1.201 |
rviz启动比较慢,要稍等一会才能看到点云数据