1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
| #include <iostream>
#include <stdio.h>
#include <vector>
#include <iomanip>
#include <unistd.h>
#include <pangolin/pangolin.h>
#include <Eigen/Core>
#include <Eigen/Dense>
using namespace std;
using namespace Eigen;
int main(int argc, char **argv)
{
pangolin::CreateWindowAndBind("Trajectory Viewer", 1024, 768);
glEnable(GL_DEPTH_TEST);
glEnable(GL_BLEND);
glBlendFunc(GL_SRC_ALPHA, GL_ONE_MINUS_SRC_ALPHA);
pangolin::OpenGlRenderState s_cam(
pangolin::ProjectionMatrix(1024, 768, 500, 500, 512, 389, 0.1, 1000),
pangolin::ModelViewLookAt(0, -0.1, -1.8, 0, 0, 0, 0.0, -1.0, 0.0)
);
pangolin::View &d_cam = pangolin::CreateDisplay()
.SetBounds(0.0, 1.0, 0.0, 1.0, -1024.0f / 768.0f)
.SetHandler(new pangolin::Handler3D(s_cam));
vector<Isometry3d, Eigen::aligned_allocator<Isometry3d>> poses;
Eigen::Isometry3d T_camera = Eigen::Isometry3d::Identity();
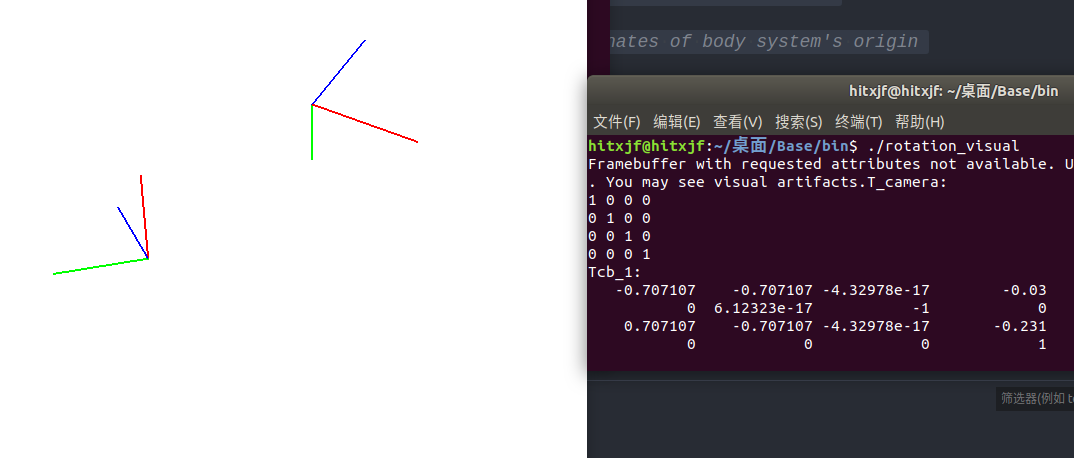
cout<<"T_camera: "<<endl; cout<<T_camera.matrix()<<endl;
poses.push_back(T_camera);
Eigen::Isometry3d Tcb_1= Eigen::Isometry3d::Identity();
Matrix3d R1 = AngleAxisd(M_PI/2,Vector3d(1, 0, 0)).toRotationMatrix();
Matrix3d R2 = AngleAxisd(-3*M_PI/4,Vector3d(0, 1, 0)).toRotationMatrix();
Matrix3d Rcb_1 = R2 * R1 ;
Eigen::Vector3d tcb_1; tcb_1 << -0.03, 0, -0.231;
Tcb_1.rotate(Rcb_1);
Tcb_1.pretranslate(tcb_1);
cout<<"Tcb_1: "<<endl; cout<<Tcb_1.matrix()<<endl;
poses.push_back(Tcb_1);
while (!pangolin::ShouldQuit()) {
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
d_cam.Activate(s_cam);
glClearColor(1.0f, 1.0f, 1.0f, 1.0f);
glLineWidth(2);
for (size_t i = 0; i < poses.size(); i++) {
Vector3d Ow = poses[i].translation();
Vector3d Xw = poses[i] * (0.1 * Vector3d(1, 0, 0));
Vector3d Yw = poses[i] * (0.1 * Vector3d(0, 1, 0));
Vector3d Zw = poses[i] * (0.1 * Vector3d(0, 0, 1));
glBegin(GL_LINES);
glColor3f(1.0, 0.0, 0.0);
glVertex3d(Ow[0], Ow[1], Ow[2]);
glVertex3d(Xw[0], Xw[1], Xw[2]);
glColor3f(0.0, 1.0, 0.0);
glVertex3d(Ow[0], Ow[1], Ow[2]);
glVertex3d(Yw[0], Yw[1], Yw[2]);
glColor3f(0.0, 0.0, 1.0);
glVertex3d(Ow[0], Ow[1], Ow[2]);
glVertex3d(Zw[0], Zw[1], Zw[2]);
glEnd();
}
pangolin::FinishFrame();
}
}
|